Cbot
- Plant Maintenance Robot 1
Preliminary
Development Projects
Updated
7/26/15
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI
Cbot
- Plant Maintenance Robot 1
Preliminary
Development Projects
Updated
7/26/15
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI
 Installing the final components - Bumper Switch Array
Installing the final components - Bumper Switch Array
| Once
the robot is traveling using its sonar to measure the distance
to its goal, and compass to set direction, it may have to deal
with foreign objects that end up in its normally cleared path.
Two bumper switches of a new design were added to deal with this,
and will stop the robot in its tracks instantly and report an
error code, waiting for rescue. This prevents the robot from
watering places it is not supposed to! |

| Left:
Perspective view of the robot, with the two new bumper plates
installed on the front on both sides of the sonar. The red band
on each one is a tribute to my first PIC robot - PAAMI in June
2005. |
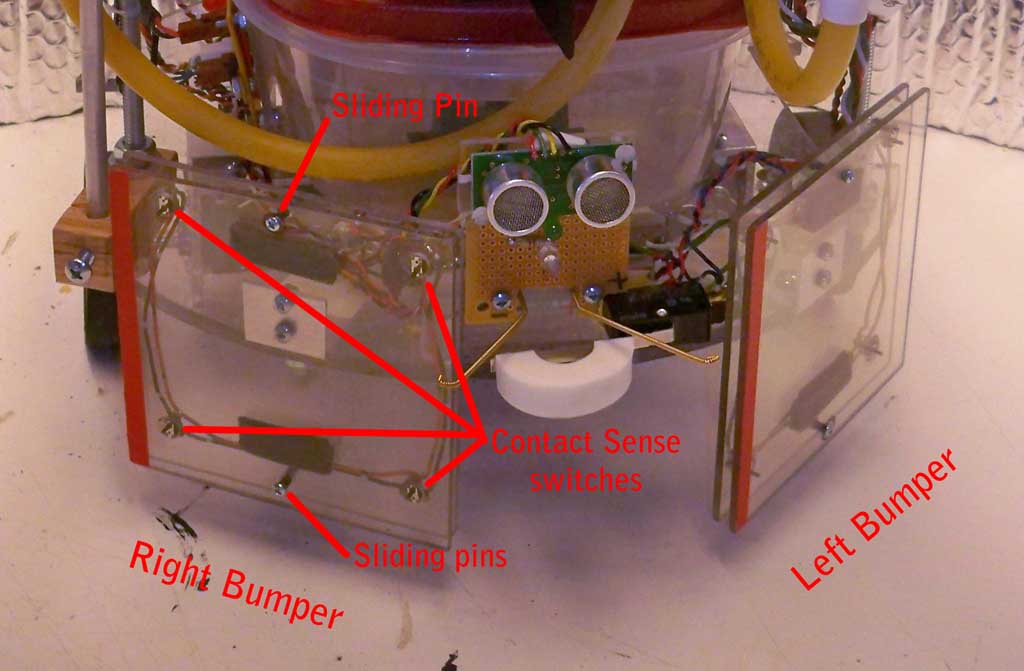
 | Left: Details
of the new design for bumper switches. Two black foam strips
are sandwiched between two lexan plates and the two plates push
in and out along two guide pins on top and bottom. Four inexpensive
"Sense switches" which are micro push button switches
from Digikey are in each corner and depress when the bumper is
touched on the front. |
v
BACK TO ROBOT PAGES
HOME