Cbot
- Plant Maintenance Robot 1
Preliminary
Development Projects
Updated
6/6/15
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI
 Development of the reservoir refill system
Development of the reservoir refill system
|
There were a lot
of challenges to getting this part of the system to work right.
Circuit boards had to be designed and built, water pumps integrated
and an IR modulation scheme to allow the robot to remotely turn
on the receiver pump when it needed to. The ability for the robot
to autonomously (all by itself) fill its own portable water tank
when it gets low before heading out to water the plants without
spilling a drop on the floor or making a mess is essential!
To accomplish this,
the robots charging station was modified so that it not only
has the spout at the top connected to the reservoir pump, but
a IR receiver to generate the on/off signals to the water pump
itself. The reservoir is a large square plastic bin, with an
integrated lid which contains the tiny fountain pump at the bottom.
Holes at the top allow the power cable to the pump and water
outlet to pass through.
The system works
quite well, right now the pump tends to fill the funnel on the
robot a bit too fast and it can overflow if I dont back off on
the flow with a valve or reduce the pump voltage a bit. For now
to prove the concept I used a pinch valve on the rubber tubing
from the pump to regulate the flow. It takes about 15 seconds
to fill the tank from the half full position. More detail below!
|
 | Left: Front
view, the current configuration. The filling funnel is seen on
the right side, which has a yellow rubber hose leading into the
top of the on board water tank, here which is at the full level.
On the left is the pump outlet, which now is stiffened by a aluminum
tube and puts out a 1/4" water stream pointing straight
down, as to go into the plants filling funnels. The robot will
not actually pour water directly on the plants - the robot will
hit a funnel in the corner of each pot as to not risk damaging
the delicate plants. The funnels on the pots will route the water
right to the plants roots using small tubing. The dome protects
the sensitive circuitry from dust, water and falling objects.
(plant leaves can short the board out). |
 | Left: Top
view, showing the white fill funnel on the right and watering
tube on the left. |
 | Left: Here
is what the water tank looks like when at the FULL level. its
about half an inch from the top. There is an internal sensor
to mark this location, as there also is one for overfilling it. |
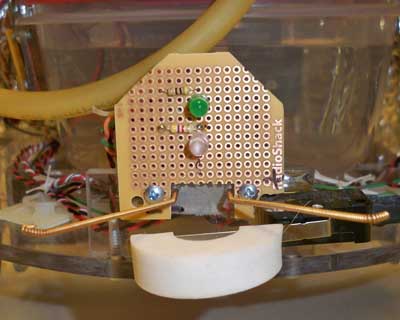 | Left: The
secret to making the robot have the ability to turn on the water
pump in the big reservoir is here, the lower white LED is a 914nm
infra red device of high power that transmits invisible digital
data. The method I used modulates the 39khz carrier used in the
IR remote sensor on the docking station with 1 khz. In other
words - a unique signal that never occurs in nature or nearly
any man made appliance. This and ONLY this signal can turn on
the water pump on the reservoir to refill. Obviously with a 4
gallon capacity, we must be careful to not dump the water out
unless the robots funnel is under the spout! |
 | Left: The
start of the demo sequence. First I hook some jumpers up to the
robots own water pump to drain the tank to empty. Normally, the
robot would do this when watering the plants when on its "mission". |
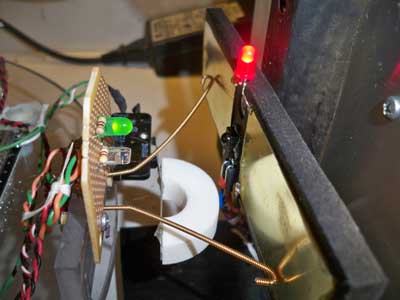
 | Left: To
see the water level, the 4 red lamps light in sequence. Left
is empty, next is FILL, followed by FULL and OVERFULL. Here,
the FILL and OVERFILL is out since the water has not reached
them with the tank half full.The robot uses this digital data
to know when to fill its tank and when it is full and to turn
off the fill pump on the reservoir. |
 | Left: Robot
is turned on simulating the point it will be approaching the
dock when it has finished watering the plants. |
 | Left: Now
within 2 feet, it slowly drives forward - correcting its path
so it will exactly connect with the charging plates on the dock.
The red lamp in between the two brass charging plates is its
aim point. It is actually homing in on the IR lamps inside the
small clear bubble on the dock at the top. |
 | Left: Dock
achieved. The funnel is exactly below the fill faucet. Numerous
tests show that after docking many times, the faucet is always
within half an inch of the center of the funnel. This means the
funnel is large enough to capture the stream. |
 | Left: The
robot next turns on the modulated beam and the water pump starts
filling the funnel. It is set to never turn the pump on over
30 seconds. Just in case the funnel is knocked off or something
bad happens to its position. |
 | Left: After
the tank reports to the micro controller that it is full, the
robot shuts off the tank pump. |
 | Left: Full
tank. The third LED is lit. The over fill LED is not... |
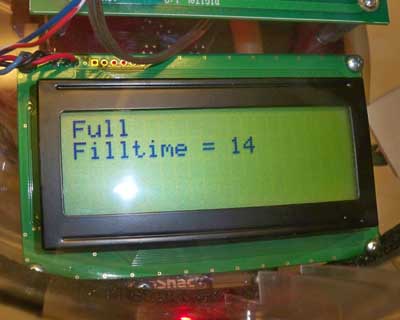 | Left: The
display reads the tank is FULL and how many seconds it took to
fill it. To do this, I simply kept track of how many cycles of
modulated 39kc I sent. 14,000 cycles were 14 seconds. It takes
1 mS (one thousandth of a second) to send one cycle. This is
all generated in the master micro controller. (robots brain). |
 | Left: Full
tank with tiny 12v fountain pump inside. Ready to water the plants
again. |
 | Left: The
front of the robot has a circuit board with a green LED at the
top to indicate contact with the charging plates, and under it
is a clear LED which transmits infra red data. Note the top of
the IR LED is flattened with a file to spread the beam out to
about 45 degrees width. The lens on a standard LED is much narrower,
only about 15 degrees for this model. Those copper colored "wires"
that contact the charge plates? Those are Guitar strings.... |
 |
Left: Robot on
charger/fill station parked waiting for night time. In the final
version, the robot will look for daylight then wake up and go
water the plants. When done, it spends the rest of the day back
on the charger, now looking for night. Then it looks for daylight
again...
This process is
a bit complex, since it must take in account what happens if
someone turns on the lights inside the house at night.
|
 | Left: The
top of the reservoir tank. Holes on the upper right are for pump
wires and tubing. A make shift pinch valve slows the flow of
water for now. |
 | Left: Inside
the reservoir is quite spartan - a tiny fountain pump, same one
as in the robot, and about 2 gallons of water. Cat litter bins
are great! |
 | Left: Electrical
connections to pump and 18v power from the docking station. By
making it easy to disconnect, we can fill up the reservoir fast
with a minimal of effort. |
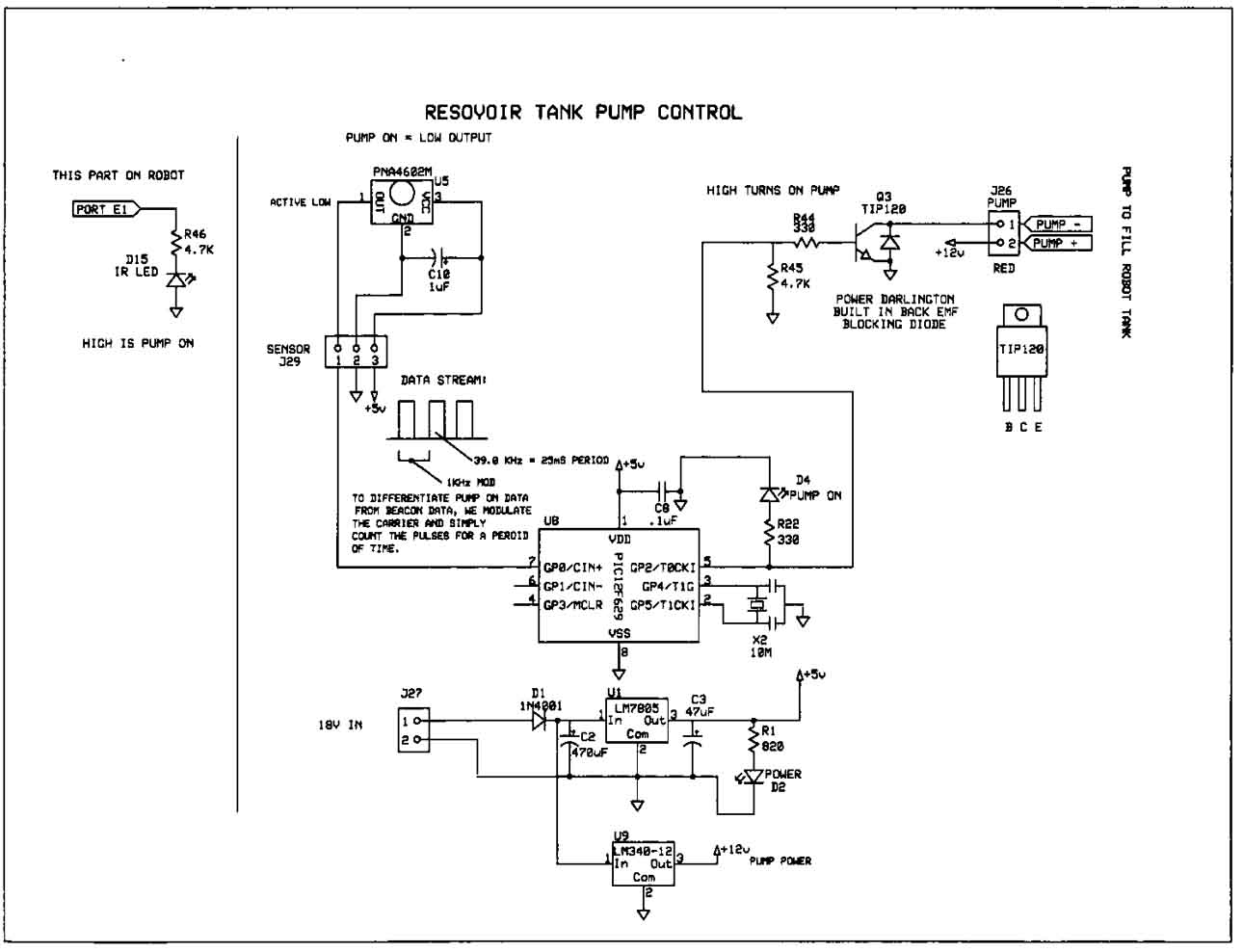
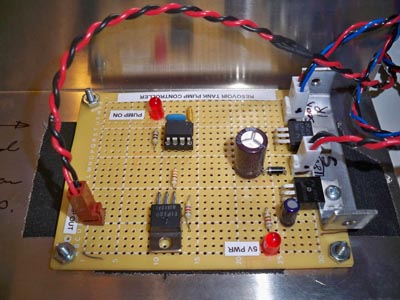 | Left: This
is the micro controller board inside the docking station for
receiving the modulated 39kc and converting it to pump on/off
signals. The micro has its own 5v regulator, and the pump its
own 12v regulator from the 18 v supply inside the dock. Everything
is programmed in C. :) |
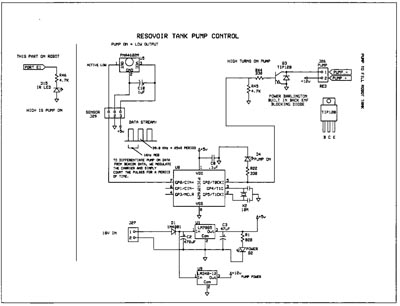 | Left: Schematic
for pump receiver. Click to enlarge. |
Movie 1
| Left:
a small movie of the robot docking and filling up. Yeah its tiny
160 wide, but hey, you can hear the pumps turning on and off... |
BACK TO ROBOT PAGES
HOME