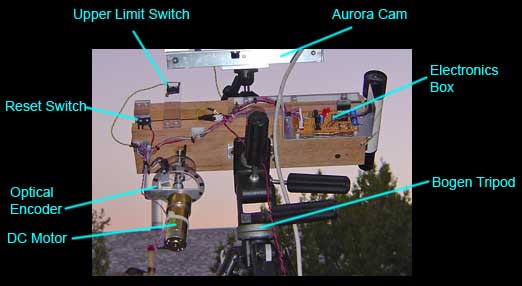
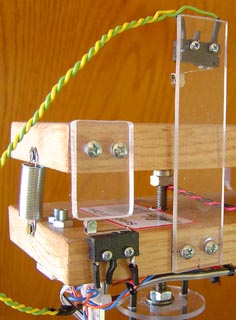
Introduction After completing the better part of a year of extensive testing of meteor and aurora patrol photography, our next goal in this automated film camera system was for a tracking mount, that would operate in synchronization with the Aurora Cam, with little or no modifications to the device itself. Since the maximum time for nearly all of my aurora patrol images are usually 10 minutes or less, it was decided upon to make the maximum tracking time of this mount at 15 minutes or so. It is not your typical barn door mount! It is controlled by two 10mhz microcontrollers mounted on a box on its side, has sensory inputs connecting to the shutter lever on the camera, and micro switches on the two boards themselves, and RESETS at the end of the exposure - no matter what the length is up to 15 minutes, during the period when the film is being advanced for the next shot by the Aurora Cam, which is a autonomous robotic device itself. The resulting images are of tiny pinpoint stars moving through the same piece of sky all night long. The ground is trailed a bit, but the stars are not. Applications This whole project started because of our desire to record the more common photographic aurora visible about half a dozen times a year from Arizona. With the proton flux (Kp value) up, you never knew what hours of the night the flux would peak, and you had to be ready at that moment to catch an exposure of the fleeting event. Staying up all night on promising but not in anyway guaranteed high Kp nights during the middle of the week was not enticing or feasible. The solution was of course the robotic Aurora Cam, detailed elsewhere on this site. The next step to make the images even more photogenic (star trails get old after a few hundred of them) was to have the camera track on the same piece of sky, and put that aurora, meteor or satellite against a much more natural background. With that in mind, applications now included all night patrols for meteor showers, even the weak ones, a complete night of sky rotation during different parts of the year with the fish eye lens, and shooting constellations going through the field all night long with a moderate focal length. How many shots do you have of Grus? or perhaps Columba? While I sleep or do other observing activities such as prime focus imaging, I can now have these hard to get shots I could only wish for before. Design Goals Optically, the limits for the projects included a 16mm f/2.8 fish eye, a 28mm wide angle, and the 50mm Super Taukamar lens. For the same piece of sky, a maximum of 10 minutes was selected to simplify and maintain accuracy in an inexpensive and robust design. Fulfilling this need was a scotch mount, but its drive section had to be reset able to start in between exposures and start tracking immediately upon start of the exposure. Electronics had to run on 12vdc, and draw a low current as to run off a small battery in the field all night long. The scotch mount itself will have a standard camera ball joint on top, so I can also use it as a standalone tracker for a camera operated manually. Construction The body of the tracker is two 1x4 oak red oak boards about 14 inches long. A very solid brass hinge with internal sealed grease was put on one end for the pivot. Aluminum plates on the surfaces ensure a solid mounting to the tripod and camera platform. The sides of the two boards are kept free of slop and sideways movement by tight fitting lexan guides, and a spring on the end keeps a small amount of tension on the two boards. Finally, the motors and optical shaft encoders are mounted with bent aluminum bars. More details are shown in the thumbnails below:
How it works electrically First a brief description for the electronics challenged people out there. Then Ill go into more details from an electrical engineering point of view. Basic description: The concept behind a barn door (Scotch) mount is to drive a 1/4-20 screw at 11.43 inches from the hinge at exactly 1 RPM to achieve sidereal rate. At least for a limited range of about 15 minutes. After that, huge errors start creeping in. Any camera put on top of the upper board in theory will give nice round stars, instead of star trails. My drive works in the following way, an electrical circuit in a box on the side of the unit turns on the motor that drives the jack screw at an average of 1 RPM by pulsing it every five seconds. It rotates about 1/12 a circle every 5 seconds, thus in 1 minute, it goes around 1 time. So there we get the 1 RPM we need for good tracking. The circuit also resets the tracker to start at the end of the exposure by reversing the motor for about 30 seconds. The tracker will only start tracking again once the shutter is closed. 5 seconds may seem a long time to drift before making a motor correction, but it only amounts to 1.2 arc minutes, about 1/10 the size of the globular M13. So it isn't resolved in even the 50mm lens.
Engineering Description: Twin PIC microcontrollers and an L298 dual H bridge motor driver are used to actuate the motor and sense the lever switches. The first PIC, has a very simple task in life - it puts out the rising edge of a square wave every 5.000 seconds, set by software. This PIC, an 12F629 has its own 10 MHz Xtal, so it is deadly accurate. The reason for having this is because any microcontroller cant do more than one thing at a time, and we cant control the motors and examine the sensors without affecting the exactness of the time reference. So for a buk a processor, its very cost effective to use one for time pulses, and the other for the automation.
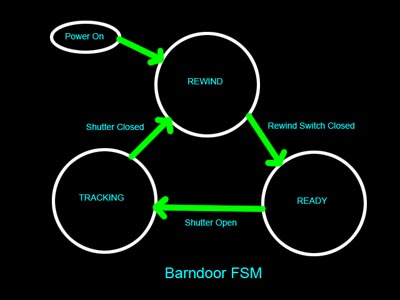
The second processor has the following input: The lower limit switch, and the photo interrupter used in the optical shaft encoder. This processor is also a 12F629, but does not need to be accurate so we use the internal RC 4 MHz oscillator. The programming is a tri-state Finite State Machine. There are three states: Ready, Track, and Rewind. We upon power up, move into the Rewind state, which checks the rewind switch. it turns on the motor in reverse at full speed until the switch is closed. Then it jumps state to the Ready State. This state constantly scans the shutter lever switch for closure. If no closure, the motor is idle. As soon as the shutter switch is closed, we jump state again to the Track State. here we have a loop that examines the shutter switch, and if closed then advances the motor forward until it sees the next black segment on the wheel. It uses the precise 5 second pulses from the first controller to time its advances. If the shutter is closed, the switch opens and we jump state to the Rewind State again. And the process repeats. This way, no matter what the exposure time, the system always works. You just have to allow about 1 minute between exposures (which I always did anyway) to rewind, which after a 10minute shot takes 35 seconds. For manual use as a normal barn door, a standard toggle switch is connected into the shutter switch cable so It can be used without the Aurora Cam.
Testing An 80mm refractor with a 1/4-20 plate mount was put on the ball head, and with a high power eyepiece, stars were examined in various parts of the sky. Tracking was spot on, even after 10 minutes, and the system was proclaimed accurate. The next step was to put the Aurora Cam on the ball head, and do an all night exposure sequence. The resulting images are remarkable! While the horizon is blurred from sidereal motion in 10 minutes, the stars are micro pinpoints. With this test accomplished, we are ready for dark of the moon imaging. Testing Results Here are some images taken with this system to demonstrate the proof of concept of the entire robotic system:
1 Hour Movie of northern sky moving (6 second animated GIF) The Future We are looking forward to upcoming meteor showers with zest now, and more coronal mass ejections on the sun to cause nighttime aurora over Arizona. Being able to use the tracker stand alone means a fast tracking mount for evening runs at star parties, and sunset comets.
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||
|
FastCounter by bCentral |
 Night Shot during bright moon, with star
trails. 1 min, 28mm f/3.5 Canon 10D
Night Shot during bright moon, with star
trails. 1 min, 28mm f/3.5 Canon 10D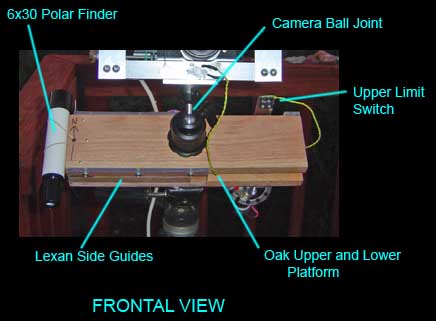
 Rear View
Rear View





{kind=link}