|
Here you will find the start page
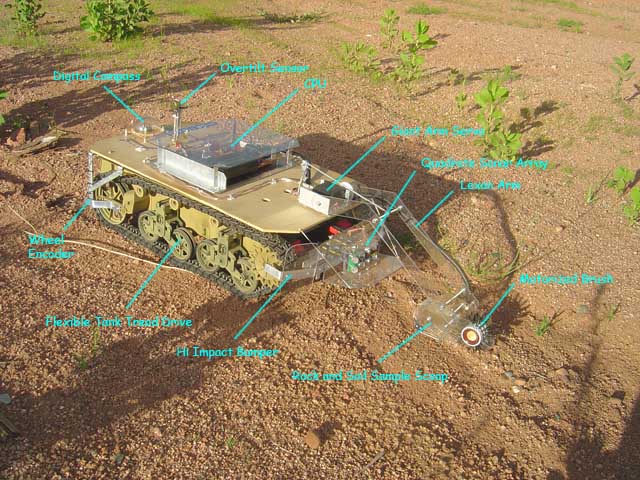
for our latest project, the GeoBot. This will be our first outdoor
roaming autonomous machine, and is already outweighs any robot
we have made in my lab yet. The goal of this project is to create
a autonomous robot that can drive from a release point to a predetermined
collecting area at a specified distance, then collect rock and
soil samples and return them to the base. Although this seems
a rather modest task, it will require a machine that can cope
with very rough terrain, avoid large rocks and trees, and maintain
a heading to put it as close as possible to the collecting area.
Consequently the robot will be big and heavy, and will operate
completely different from the ordinary indoor wall banging servo
bot. Here are a few points we will address:
The Final Report is Here
|






HOME