GeoBot 1 Sonar Array Ground Plane and Final Testing Updated 4/3/06
This will be a follow up article, on the quadrate sonar of the Geobot. Last time, we detailed the theory of operation of our multi zone pattern, and how we tailor the robots response depending on what zone the closest danger is in. This works very well as you will see at the end in a small movie clip. One additional problem remained to be solved however for the system to work in the outdoor environment.
Seeing the Ground
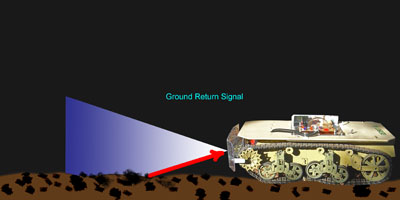
While the drawings below show a nice 30 degree cone pattern for the sonar beam, in fact it is a spray in every direction in front of the emitter of a loud super sonic chirp. The actual shape is very wide - in fact 180 degrees next to the emitter, and narrows down to 25 degrees at 4 feet. Since the sonar is 6 inches off the ground, it receives a very strong signal from the outdoor gravels, rocks and sand that lies flat on the ground. A constant 1 to 3 foot reflection swamps the data in which we are trying to see obstructions in the path of the robot.
Shaping the Beam
We did a lot of research on sonar beam shapes, and discovered that the few individuals that tried to change the shape of the beam to narrow it always failed or gave up. Such things as fuzzy tubes around the emitter, shrink tubing, cork pads, rubber tubes, and a whole array of other materials were tried by us with only a very tiny effect on the beam pattern. We still could always see the ground. But we did find a way to change the beam, and it works very well.
Shaping by Reflection
This first graphic here illustrates the problem well: The bottom of the sonar beam strikes the ground, and the nearest edge where it hits bounces back and is reported as the obstacle distance. Even tilting the beam up did little for us - except to detect the trees and ceiling!
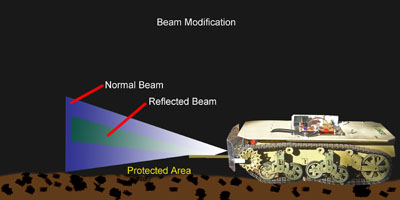
The problem did not exist inside the house on the work bench or smooth floors, since they have no coarse structure to reflect the beam back. It was discovered however, that we could DIVERT the beam exactly like a mirror reflects the light of a flashlight. By using a grazing incidence reflection, we were able to shadow the ground from the view of the emitter and receiver.
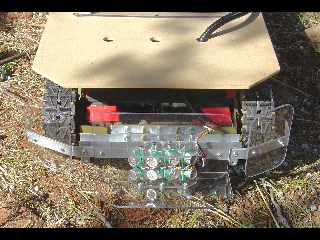
After some math to determine the size reflector to shield out the ground to 4 feet, a 4 inch deep by 10 inch wide proto type was constructed. It works like this drawing here, mounted just below the quad array, it creates a sonar shadow on the ground in front of the robot. Yes a few rocks may slip by, but the bumper will catch them if they are tall enough.
This prototype taped on with red cloth tape proved the concept, the math was spot on. Field tests in a very rocky environment proved it worked fine, and the ground signal was almost always past the maximum sonar zone.
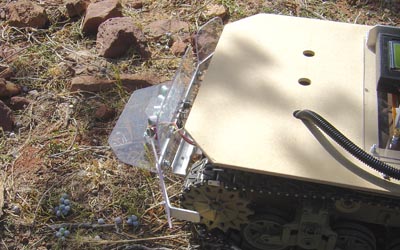
The final version seen here is made from .09 polycarbonate sheet. Its mounted on the bumper so if it hits a rock or tree, the bumper will take over. So far, this hasn't happened - the sonar stops it long before it hits.
mpg Movie (Click Here) This 500k movie clip will show our outdoor test of the Geobot quadrate sonar in action. I placed a array of large blocks of petrified wood and repeatedly put the Geobot on a collision course with it. After many trials, it never once touched any rock, and drove around all of them.
Conclusions
This sensor array moves us one step closer to our final goal of the Geobot remotely collecting rock and soil samples and returning it to the base. By including the sonar avoid level in the Priority Arbitration Architecture, the robot will continue on with its task after avoiding major dangers. Our next step will be to add the Devontech digital compass module, to keep the robot going a specific direction.
HOME