|
The Process of
home navigation needs every advantage it can get for the blind
and helpless robot which only seeks to fulfill its daily task.
Here, we are going to demonstrate using the new whisker robot
- TDR - this concept and explain in detail and demonstrate with
a video clip the process of "Wall Following" as implemented
with not bumpers, but with whisker on the front of the robot.
The basic concept is this: To help a robot get from one location
to its destination, you can use the walls and solid surfaces
in a home to find other locations that are also near the walls.
In this way for example, a roving trash can robot can move from
its normal home in the bathroom, over to the dump point in the
kitchen and back by simply "feeling" its way along
the walls to get to the two destinations!
Consider for example
you are trying to get from the bedroom to the kitchen in the
middle of the night to get a snack. Without turning the lights
on in the pitch dark, how would you do it? The answer is that
you would feel along the walls - having a mental map in your
mind of what the house looks like - and eventually, maybe after
tripping on a shoe get there. When we send a robot on a similar
routine, we also have to keep sharp for obstacles in its path,
and have enough intelligence to either get around them or return
to base. Lets now illustrate with PIC'y the Robot how this works.
(PIC is the type of microcontroller brain chip in our robots)
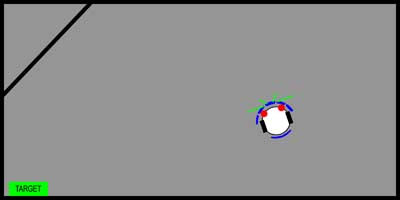 |
Left:
Here inside the 2 x 4 foot robot arena the robot is somewhere
in the middle and needs to get to the green target. That may
be the first of several destinations or perhaps the plants to
water. But this is what You and I see when we look at the problem! |
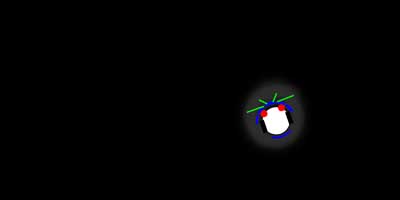 |
Left:
What the robot "sees" because it is blind and only
has feelers is this view - Nothing. It doesn't know how big the
room is, and even where the target is. How will we get there?
Read on gentle reader... |
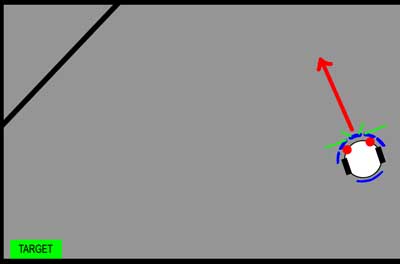 |
Left:
First the robot moves forward and starts looking for any type
of touching of the ends of its feelers. |
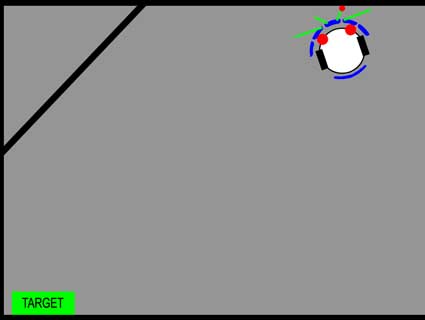 |
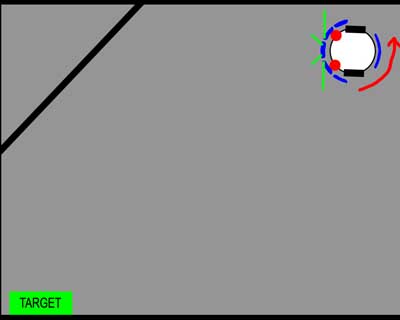
Left:
Once a contact is made, the robot will turn the correct direction
to align itself with the wall based on which feeler touched first. |
 |
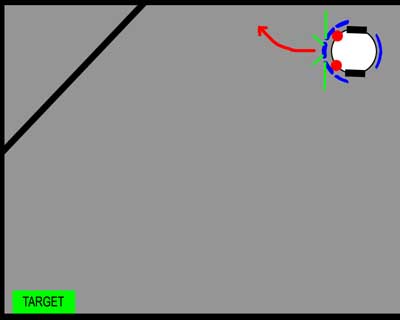
Left:
Now aligned to the wall, the robot can proceed to follow it because
it knows its on the right side. |
 |
Left:
To do this, we move forward AND back right at the same time. |
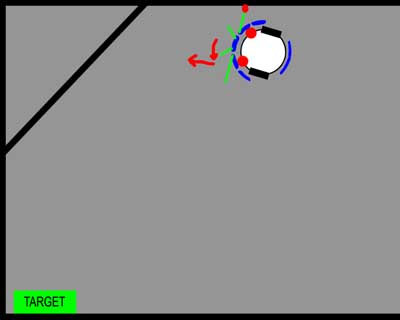 |
Left:
When the side feelers touch, the wall has been found again, but
now several inches down from where it started. |
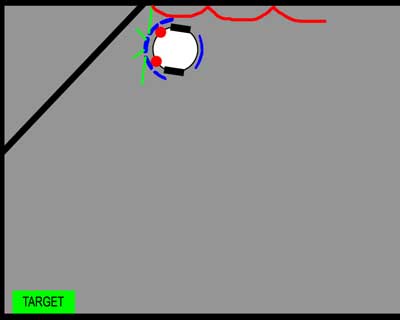 |
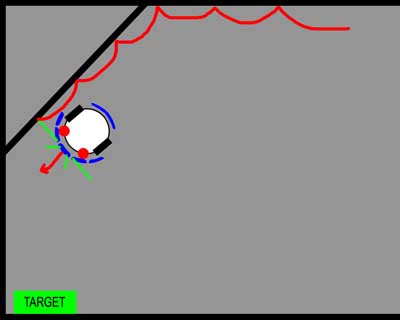
Left:
This process is repeated over and over and the path it takes
here in red shows its advancing motion along the wall. |
 |
Left:
Even if the wall turns, it will follow. |
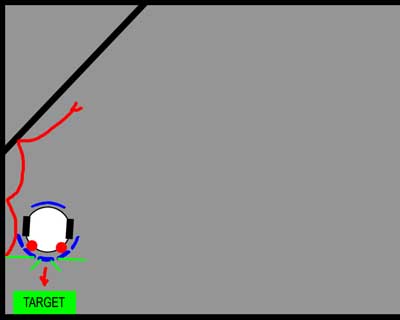 |
Left:
The target is dead ahead. As long as its against the wall, it
will always find it. |
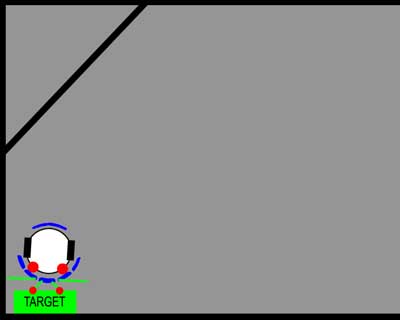 |
Left:
The robot must be able to recognize it has found the target by
say floor color or a light beacon. But by wall following it will
eventually get there! |
 |
Left:
In the robots mind, this is what IT sees - no walls, no boundaries
just points it touched along the way. It is as if you have found
the kitchen and now can have a snack! |
Video Clip on YouTube
|
Left:
Here is a short clip showing the robot in the arena doing what
is described above. Notice that when it gets to a corner, it
knows just which way to turn. |
|

