 T.D.R.
Tactile
Design Robot
Updated
4/17/16
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI
T.D.R.
Tactile
Design Robot
Updated
4/17/16
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI

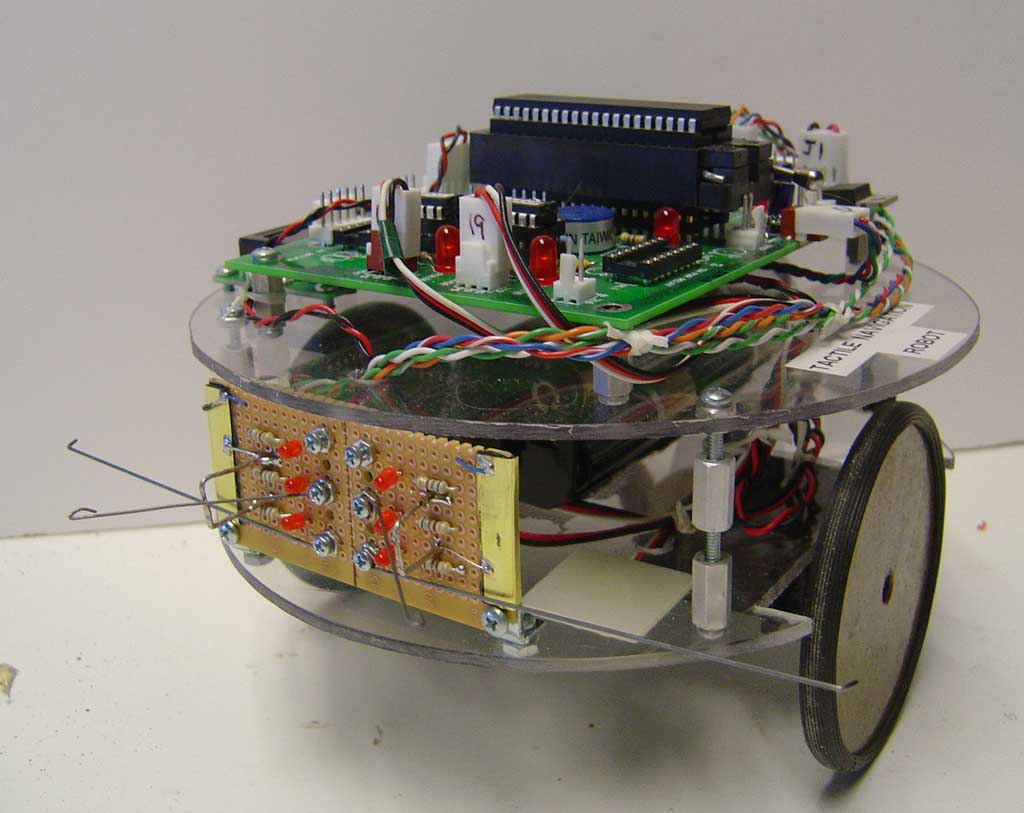
| A brand new robot, designed
to test out the concepts of using insect like antennas and small
mammal whiskers to assist in internal home navigation. Only six
inches in diameter, it is the perfect size for our robot arena
test area and will be right for upstairs testing in the home
environment. All programming is done using CCS-C. |
Current Progress:
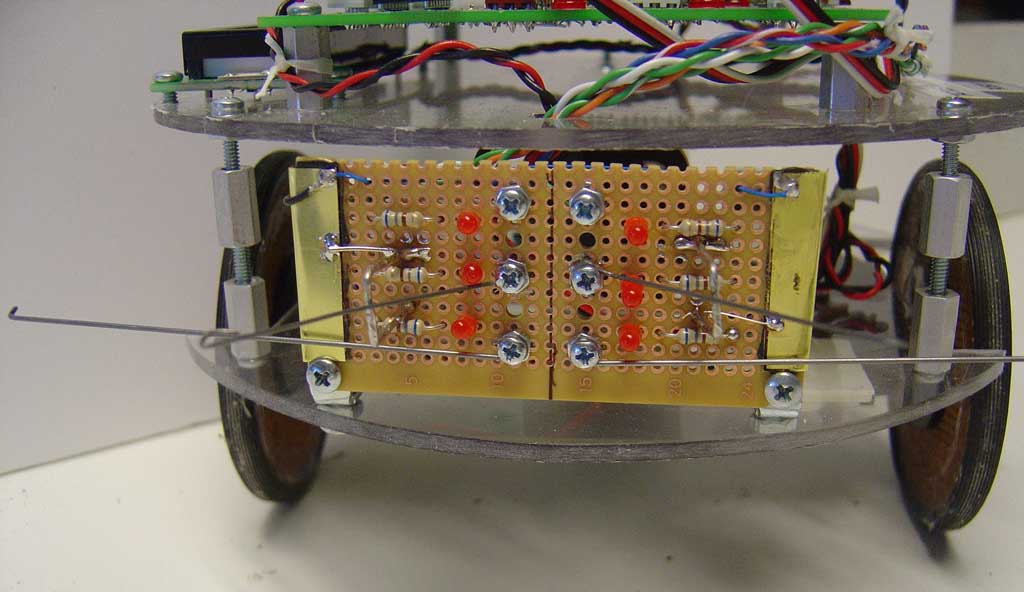
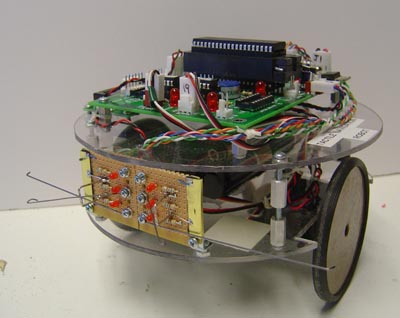 | The TDR
robot with frontal whisker sensor plate installed. Room for three
sets of whiskers are provided, with two sets installed here.
The robot can now navigate the arena by "feel" and
using the whiskers as touch sensors, take evasive action. This
is one small step toward increasingly sophisticated behavior
that is planned. |
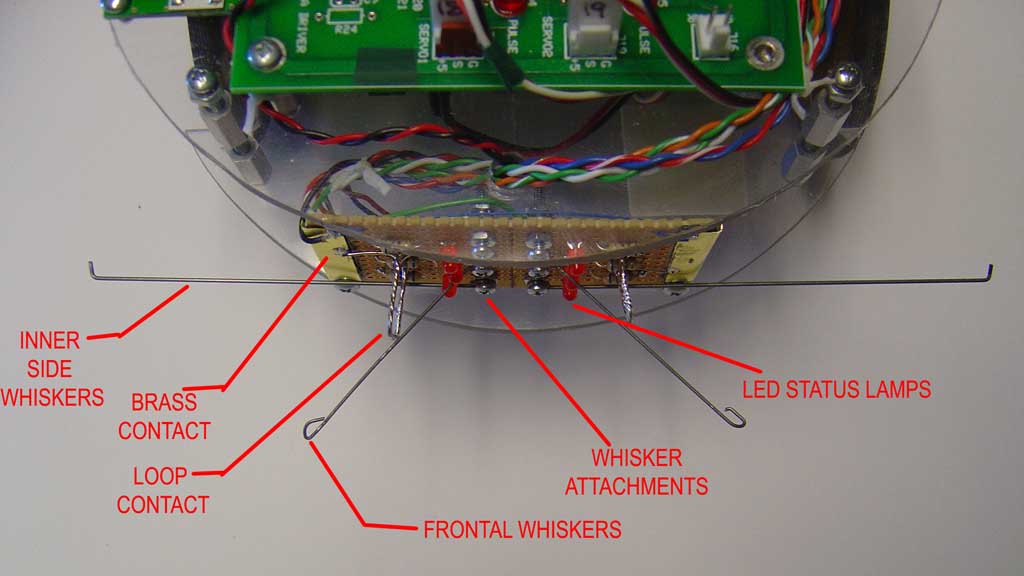
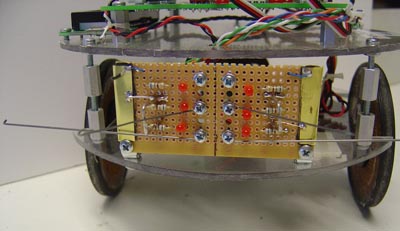 | Front view
showing layout of the two sets of installed whiskers. The top
set has not been put in yet, and will be the longest ones. |
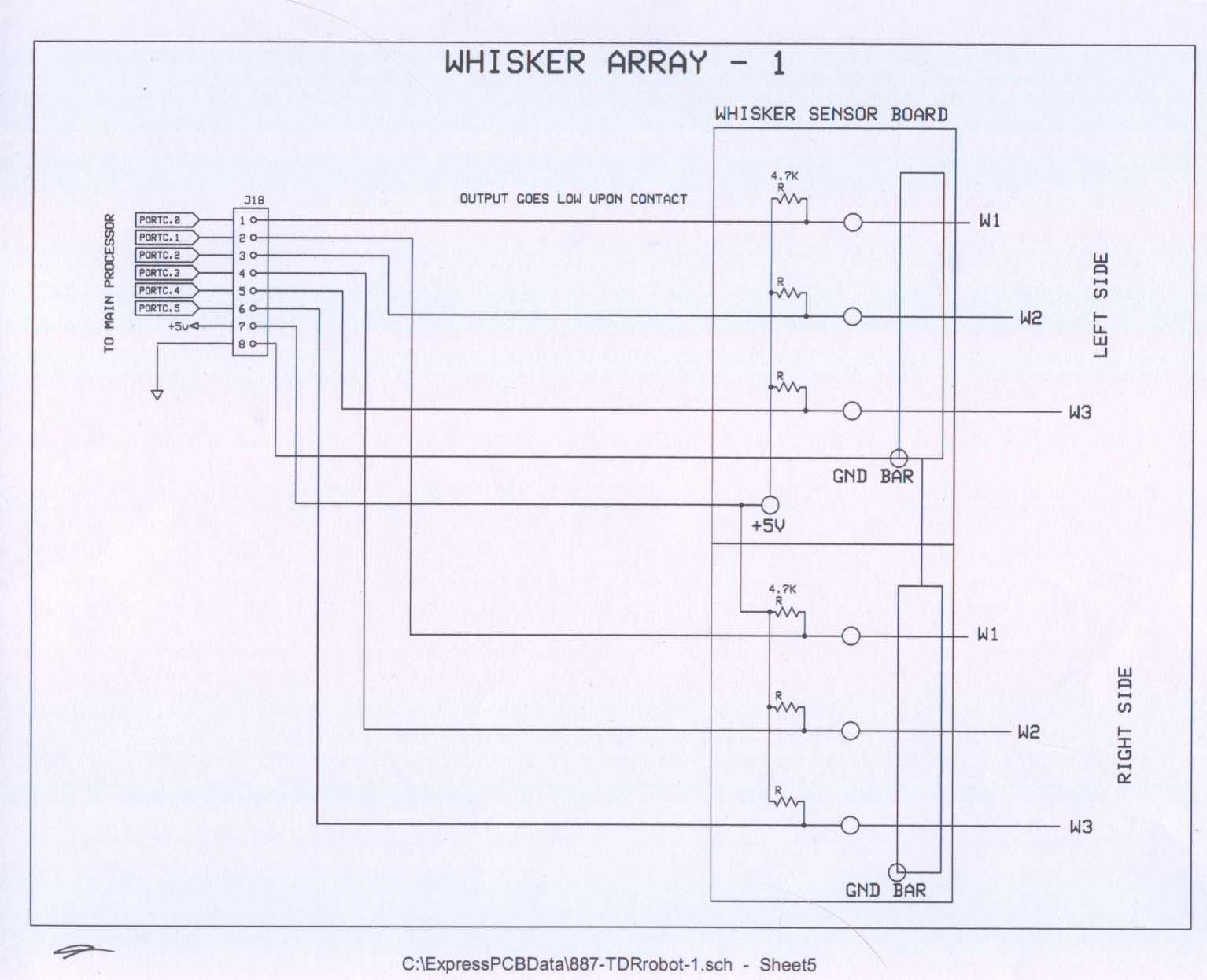
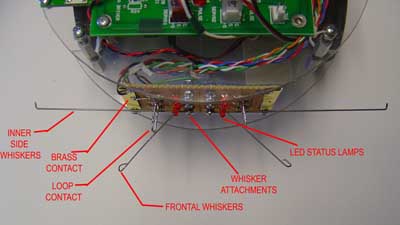 | Sensor plate diagram. When
the wires touch either the brass plates on the ends or the buss
bar loops under the frontal wires, the whisker is grounded. This
sends a high to low signal to the main processor. Red LEDs indicate
an impact as well. |
Finite State Diagram of initial TDR
Movie 1
| Here
are three You Tube movie clips of the robot in action in the
arena. This first one is the robot bouncing around inside the
2 x 4 foot test arena using its whiskers for navigation. The
robot turns more when the frontal whiskers are touched than when
the side whiskers are activated. |
Movie 2
| Direct
frontal impact here, shows the response of a face on hit with
the wall. To detect this, we first stop the robot when either
right frontal or left frontal whisker is touched. then wait about
1/10 of a second. Then look at the OTHER whisker to see if its
also touched. this way a frontal hit with both can be detected.
You have to wait and look because the processor is so fast that
it will start reacting to one side micro seconds later, and ignore
the second impact on the front which may occur milliseconds later. |
Movie 3
| A
typical problem with simplistic programing like this is what
is infamously known as "corner entrapment". This is
where the robot gets stuck (forever) in a corner because it rocks
back and forth on its whiskers to try to escape the two walls.
There are many simple fixes for this, but until I put them in,
I wanted you to see what it looks like. |
Previous Uploads on this robot:
Intro page 1
HOME
{kind=link}