
NavBot 4
"Arm Logic Robot"
Updated 12/11/14
 Article 4: Caliper Style Gripper in Action - 1
Article 4: Caliper Style Gripper in Action - 1
| Here you will find a photo
sequence of an actual autonomous run of the Navbot 4 moving a
foam block around from one end of the Arena to the other. At
the end, Ive posted the actual movie so you can see the caliper
gripper in action. |

| The
robot starts in the center of the arena, the green block on the
left is the target, the bin on the right is the destination.
This block could also be any thing in the household that needs
to be moved about daily, such as pet food, plants, cleaning supplies
or errant socks. |
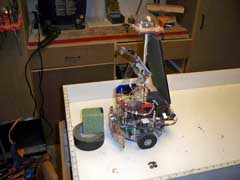
| The
robot drives to the block, and stops exactly one inch from it
using sonar. |

| The
gripper arm lowers, and the caliper gripper itself opens wide. |

| The
caliper closes on the block and if the robot senses it in its
grip, it continues. |

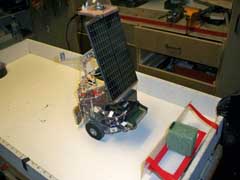
| Lifting
the block to the transport position. |

| Backing
up away from the start position. |

| The
robot rotates 180 degrees, and travels toward the storage bin. |

| Heading
toward the bin |

| Using
sonar once again, the robot sets its distance from the bin and
centers itself. |

| Lowering
the arm into the bin |

| Grippers
opened, block delivered! |

| Arm
and gripper put in stowed position. |

| Backing
up |
| Leaving
back to the center start position. The entire procedure takes
a few minutes. |
Movie 1
| This
is a movie I made with my Sony cam, which can record tiny .mpg
clips for use on the web. Turn your volume up to hear the robots
sounds.... |
|
Conclusions
on this type of gripper.
The caliper type
gripper works fine for payloads you can pull right up to with
the robot, but because the gripper is on the end of a fixed length
arm, the distance between target and grip must be fairly precise.
Also, without running the motor constantly on the grip, the motor
tends to get loose when the processor stops sending the servo
pulses and it cannot hold on very tight. Thus the foam blocks.
Ideally, each servo should have its own controller to keep the
pulses running and keep the arm and gripper set for a specific
pressure.
|
HOME