NavBot 4 "Arm Logic Robot" Updated 12/9/14 
For this mini series, we are going to start by adding a simple fixed manipulator to the robot, explore what can be done, and then advance the complexity of the manipulator in small steps. While the NavBot-3 platform did accomplish navigation feats that no robot I've built before had done - without some form of arm, grasper or even a simple scoop this robot had very limited potential around the home environment. Lets explore what can be done in both graphical robot cartoons (return of "PIC'y the Robot") and with real world engineering constructs. (Note: we use Microchip "PIC" processors in this robot, thus the name) Article 3: Caliper type gripper
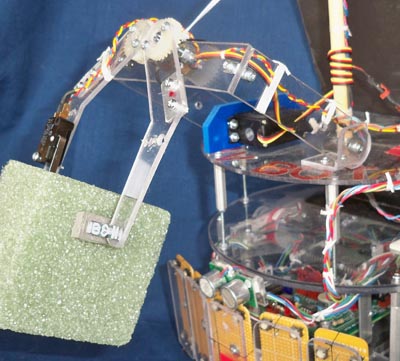
The basic configuration of the gripper on the end of the U shaped lifting arm. The added weight made it very hard for the robot to lift both the gripper, its payload and the arm itself with the small servo I had used for the original fork lift type testing. An elastic cord, seen as the 45 degree white band here will be replaced very soon with a standard metal coil spring. This lifts the arm about 45 degrees up and takes the load off the motor. I used this exact method years ago with the huge Geobot, which was able to lift rocks and dirt off the ground on the end of a long 2 foot arm. That robot was several years later parted out, it was so big to fit on the display shelves in the house! Ironically, the gripper calipers here are made from Geobots old arms...
The robot stands around 16 inches tall, and is 10 inches in diameter. It has a big solar panel on the back for recharging its 12v gel cell, and on the top a digital compass for in home navigation. Other features include high resolution optical shaft encoders on the wheels, bumper switches, a frontal sonar and all is powered by a huge 40 pin 16F877a PIC processor.
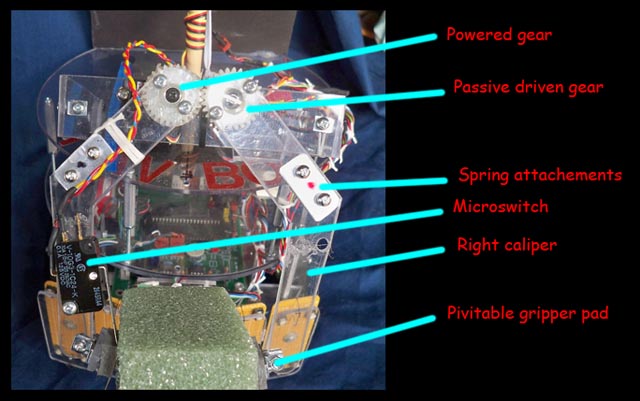
Left: The 90 degree twin caliper type gripper is not seen very often on todays robots. Most robots have a forward facing gripper. Here, the two gears at the top rotate together because they are meshed. The left gear is driven, and connects to the servo motor. The right gear free wheels and is connected only to the right caliper. How it works is when the left gear rotates and moves the right caliper back and forth, the left one moves the opposite direction. This makes the gripper open and close with one motor.
By adding a micro switch as seen here, I can determine if something is in the gripper when it is closed. See the metal lever coming down from the switch? thats the lever that clicks the switch when the gripper squeezes something. A green foam block is grasped here.
This is how the gripper works, the arm lowers to the horizontal position, the gripper closes on the target, and if the switch is closed - the robot lifts the item up for transport. The theory is sound, but there are some programming issues to overcome yet. First, I can at this point only operate one motor at a time. This means when the gripper is done closing, I stop sending the gripper servo pulses and the motor relaxes a bit and loosens its grip. Also, if you want to hold the payload at say a 45 degree during transport - you must continue to provide the servo with pulses continuously or it will coast and fall down. And by the way, did I mention the robot must also navigate, drive and avoid obstacles while doing all of this?
These are the problems I will be working on as I progress in the development cycle on this new arm.
Click on the links below for the movies to open in windows:
Left: Here are some small 160 wide mpg movies of the gripper in action. You must consider all possibilities when grabbing something, from a missing target, to dropping a slippery target after trying to lift it. Here is a description of this set:
Movie 1: The robot approaches the target, slows, then lowers the arm. then it slowly grabs the target, confirming the grab with a "Happy Beep". Then it lifts it backs up, rotates and drives off.
Movie 2: Same but now I pull the block out as it grabs it. You can see it try twice to grab something before it gives up.
Movie 3: Same as above but a close up frontal view
Movie 4: Now I pull the block out after it lifts it, just like it had dropped it. It opens up, and stops all action.
Additional articles in this series: