NavBot 3-A "Arm Logic Robot" Updated 10/12/14 
Here are some images to demonstrate the capability of a one lever armed robot with a simple fork like scoop on the end of the arm to act similar to a fork lift. Even with one movable joint at the base, any robot can now perform tasks with specially shaped containers and become a more useful device around the house hold. One such application for example would be to deliver a small trash can to its dumping point, or to move plants around the home as to take advantage of the current sunlit window. Here is how it works.
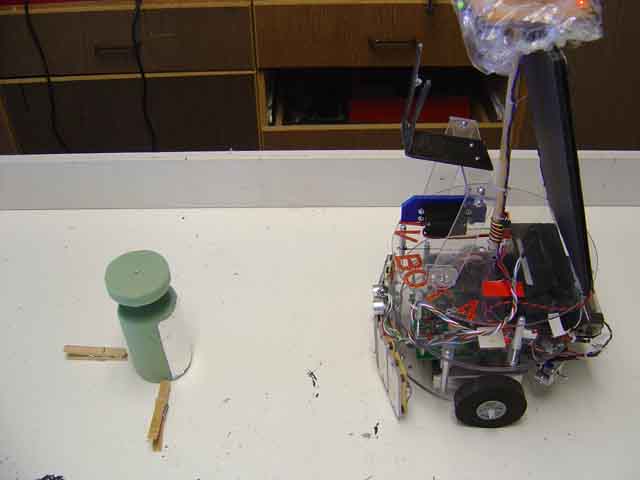
Step one in the sequence is the robot uses its sensors to approach the container with its arm up in the stowed position:
Next at a safe distance, it lowers the arm to the scoop position:
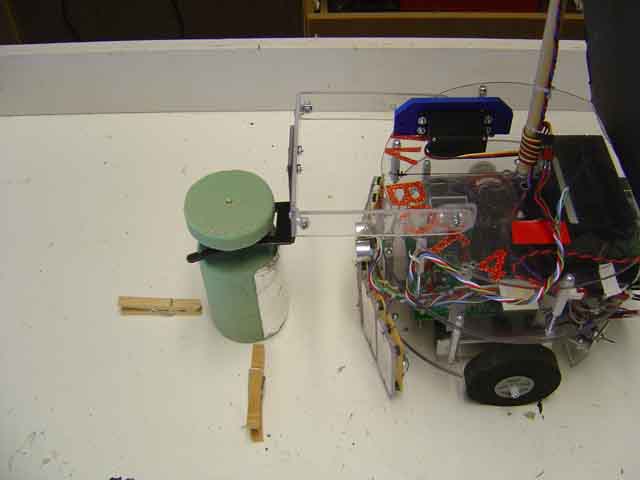
Now in the case of this robot, the sonar still can read below the arm and adjust the distance to the target container to put the fork directly under the right location:
Approaching slowly at half speed the robot stops when its sonar tells it the correct distance from the target has been achieved:
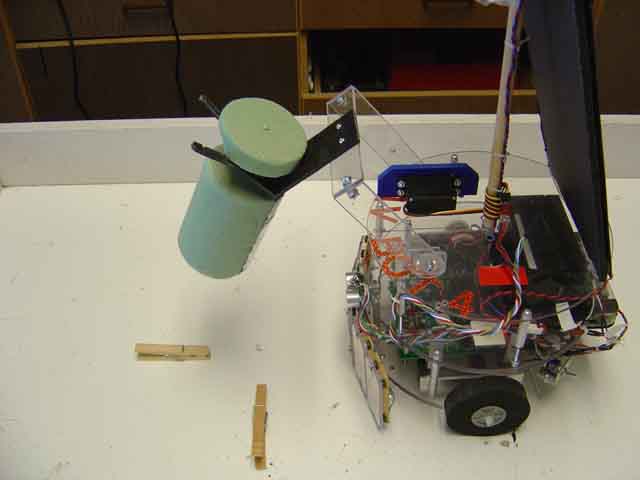
Next, the robot lifts the target to its travel position, which allows full use of the frontal sensors to be active:
We then back up a few inches to clear the loading dock, and...
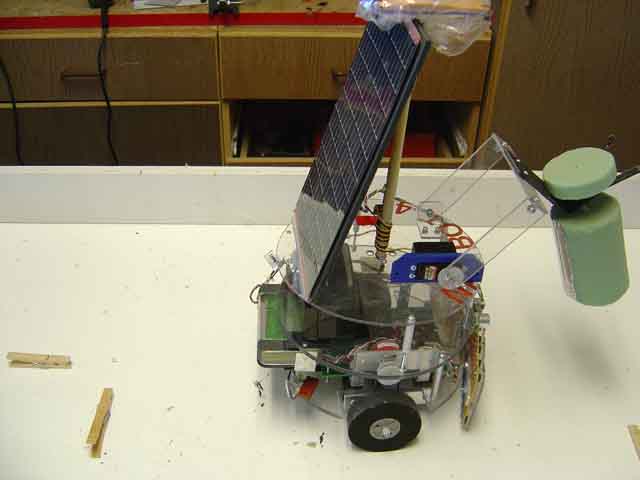
Rotate 180 degrees and drive off to the next destination, which would be now the drop off point.
Driving off. When the destination is reached, the robot lowers the arm, backs up and drives off to the next goal.
Movies.
I am still learning how to do movie clips the best way for robot demonstrations, so bear with me! Lets start with a small 160 wide mpeg movie which I can embeded into my web site and is not so huge it takes up the whole remote hard drive:
This shows the above sequence in action, and the robot drives off!