 SkidBot
Updated 12/19/05
SkidBot
Updated 12/19/05

| Here you will find the test
platform we used to develop the highly bash resistant bumper
system for Geobot-1. After several months of trying various concepts
and designs, we came up with this one which was rugged and reliable
even on a Lego constructed robot. The design was upscaled and
installed in Geobot seen here. |
 | Skidbot
is a 4 wheel drive machine, that steers like a "Bobcat"
construction front loader. Both wheels on each side always move
in the same direction, backward or forward and are driven in
pairs with a single shaft per side and a worm drive. The bumper
front plate is seen here, ready for a rugged try out with some
big rocks! |
| The
large 4 wheel drive system goes over some pretty big pebbles,
some over an inch tall. To turn, the wheels on one side go forward,
and the other side the wheels go backwards, creating a somewhat
jerky but dependable traction steering system. It essentially
"skids" around turns, thus its name. |  |
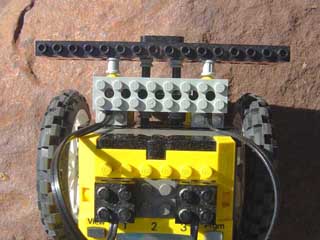 | The
new bumper prototype consists of a front bar with two push rods
that slide in and out under spring tension. They push two switches
located behind the grey spacers to reach out and push the buttons.
It is flexible, yet can take frontal and side impacts and remain
durable and reliable. |
 Movie Clip
900Kb
MPG
Movie Clip
900Kb
MPG
| This
small movie clip with a small amount of sound shows a few feet
of navigation with the setup. |
HOME
You are visitor
number since June 17, 2001

FastCounter
by bCentral