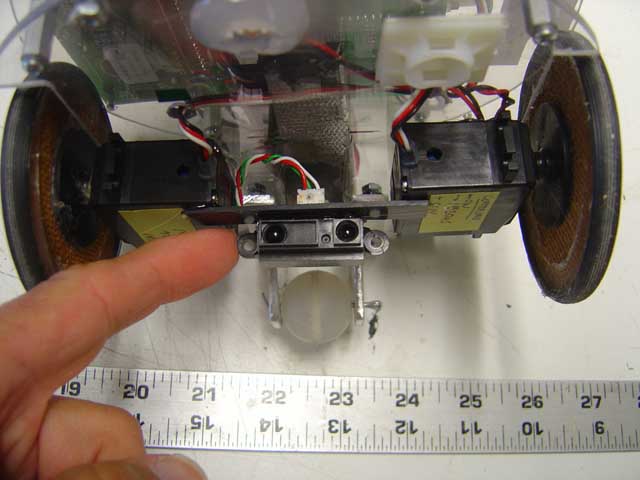
Sharp Sensor Test Robot (TDR) For evaluating the use in home interior navigation Above: Underside of TDR with sharp sensor installed in the middle on the bottom. Updated 9/12/16 Key Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE, AI

This robot carries the Sharp GP2D12 optical ranging sensor underneath, after an extensive linearization project (see here) to write a block of code to allow its use in robots. This sensor can detect distances from 9 to 80cm, with around an inch accuracy up to 12 inches and two inches after that. Here, we evaluate the sensor on our TDR test robot in the arena for future use in navigation in a home enviornment.
The Sensor was installed 9cm back from the very front of the robot on the bottom, because that is the zero point in distance for the sensor to become accurate. Between that and almost 80cm it put out an analog voltage which can be read with the processors A/D converter to 10 bit resolution. Then a distance can be read. We found that the small beam which expands from around .25 inches to about 1 inch at the maximum distance was small enough to do accurate targeting, as opposed to sonar, which has a huge wide angle spray of sensitivity. The effective range in inches is about point blank to around 23 inches.
Movie clip 1
Here is the first You-Tube video of the sensor in action in a simple test. The robot is programmed to travel forward and then turn right about 90 degrees when the sensor detects a target at 10 inches or less away. This avoids hitting the walls in this simple demonstration.
Previous Uploads on this robot: NONE.