|
The next step in
voice/sound recognition in our robot is to digitize the waveform
for a period of time that will work for most words, and send
that digitized result to the LCD display for viewing and comparison
with the actual sound trace with the oscilloscope. 10 readings
are taken after the trigger, at 50mS intervals to yield a total
time of half a second recording time. This is JUST enough to
resolve key portions of the chosen test words we will be using
for our tests. The six words are chosen because they all appear
very different in the sound traces and the robot should (I hope)
be able to distinguish them! The six words are:
TESTING, FORWARD,
ROBOT, CLICK, LIGHTON, LIGHTOFF.
The "Click"
is made with your mouth as you might call a pet...it is not the
actual word "click". This is actually the most rapid
sound the human mouth can produce.
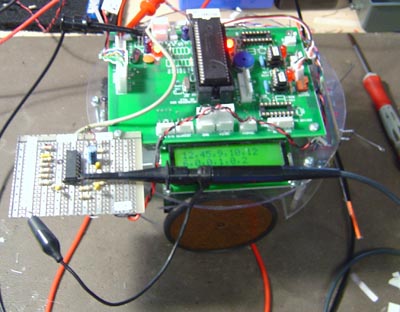 | The
robot on the bench for audio testing and programming. The main
processor is the large chip above center and is a PIC16F887 micro
controller. On the lower right the satellite board is the audio
amp and envelope generator. And to its right is the two line
LCD display Ill be sending the digitized data to. |
 | Here
is what a full second of the word "testing" looks like.
you read 11 readings, from upper left to lower right in both
lines. It would be nice to be able to send it right to a graphics
display, but hey - those are not cheap! |
 | The
scope camera is a web cam on a box that fits over the oscilloscope
display. |
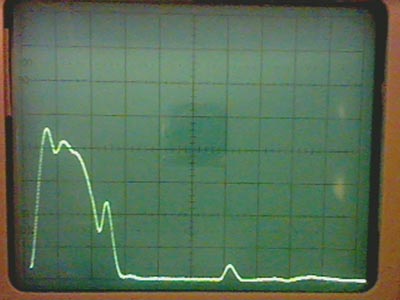
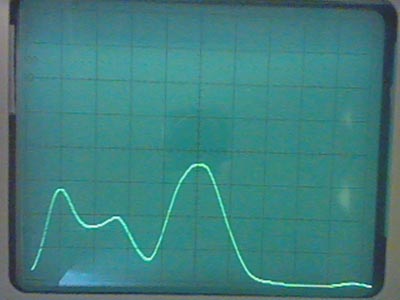 | The
word "TESTING" recorded for half a second on the scope.
From left to right is half a second, the same time as the chip
records the data. So you can directly compare the data with this
image. |
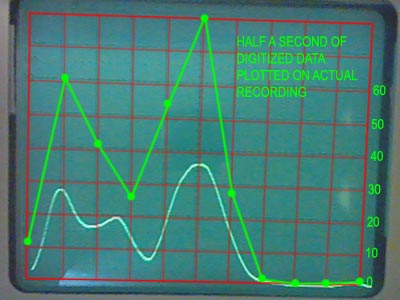 | Here
Ive superimposed the sampled data plotted over the actual photo
of the scope. You can see what the robot will see, its crude
but just enough detail to differentiate words. It gets the basic
shape pretty close. |
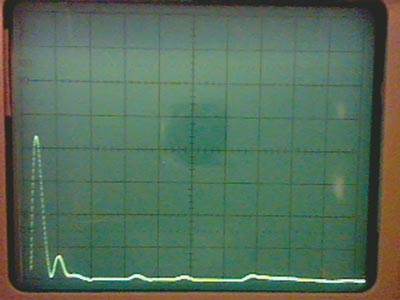 | Some
other words I recorded while I was at it. These are 1 second
recordings of the KEY words. Here is the mouth "CLICK".
The fastest click I can do is around 50 milliseconds.... |
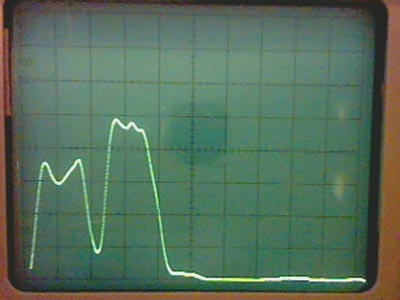
 | "FORWARD" |
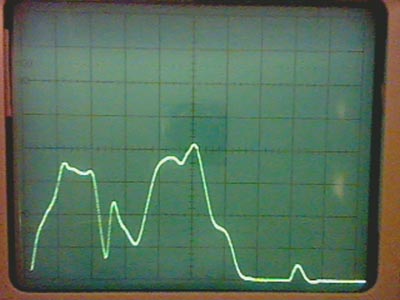
 | "ROBOT" |
 | "LIGHT
ON" |
 | "LIGHT
OFF" |
|

Above: The robot has a microphone on a short boom on the rear end, and the mic amp/signal conditioner is the small board on the other side rear. The eventual goal is for the robot to understand a small vocabulary of word commands. Updated 6/10/16 Key Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE, AI

