In this last critical single pixel eye experiment, we will demonstrate a key survival behavior of an organism such as a primitive early sea worm which had but one eye spot on the front of its feeding end. Remember that in the biological world, photo sensitive spots can be thought of as neurons that have migrated to the surface of the head and have an enhanced photo sensitive functionality. Two reasons were key to understanding this early behavior, first demonstrated in the earliest multicellular organisms nearly a billion years ago. First, the day night feeding cycle was easier to detect. In the day, some organisms would hide from predators and the relentless UV radiation from the raw sun. Second, it was an escape mechanism, such that when the organism either buried itself in the mud or found a dark alcove it could escape from predators. The detection of light enabled such behaviors to take place, and have equal benefits for robots as well.
Programming
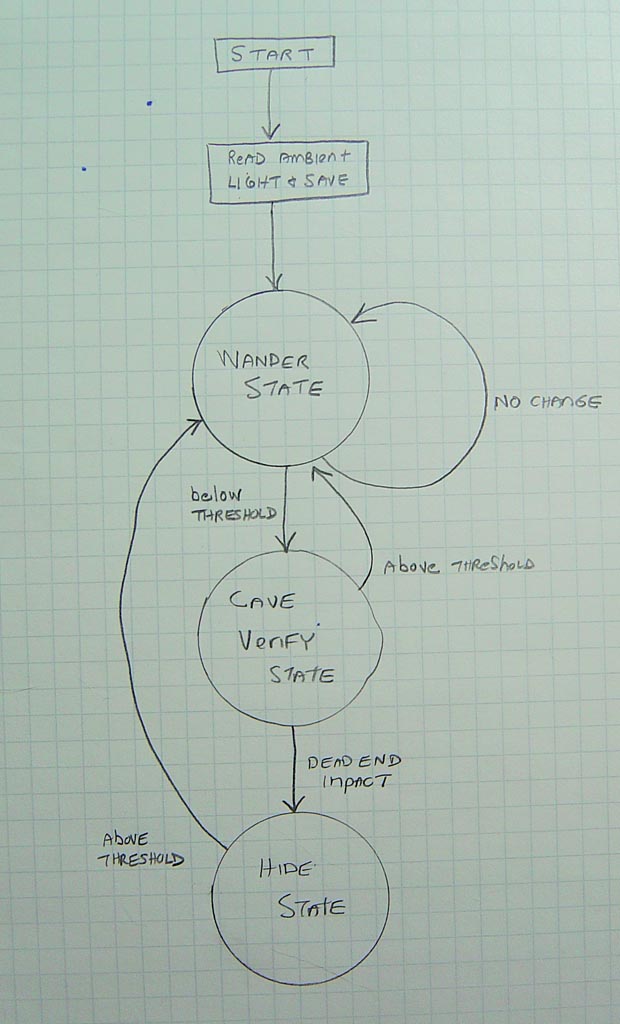
The VLR was programmed with a simple three state Finite State Machine. The three states - Random wander, Cave Verify, and Hide states enables the robot to react instantly to its environment, and find a dark alcove to take residence in. This advances the visual behavioral intelligence to the next level, that of a simple multicellular primitive worm. Here is a description of the program defining its Artificial Intelligence in detail.
CLICK to enlarge
The Finite State Machine
START - In the biological realm, this would be the birth of the organism. Here, we represent this with the turning on of the power switch to the robot.
READ AMBIENT AND SAVE - Billions of years of evolution will set this threshold level for what can be called bright and dark for an organism. But here, since the robot does not have millennia to evolve, we have the robot take a brightness reading upon power up. This we set as the daytime or full brightness level. Anytime the robot sees a drop from this value, is a potential cave.
RANDOM WANDER STATE - the organism will during the daytime exhibit a feeding pattern, be it random, S shaped or spirals. This maximizes the ground coverage for maximum food intake. Here, the robot implements a random wander mode, with full bumper impact avoidance, just like any other living creature would do.
CAVE VERIFY STATE - If the brightness drops based on the pre programmed neurons in the worms brain to below what it calls bright, then it must be getting dark and may be the entrance to a possible cave or the sediment is starting to bury the worm for cover. In the robot, if the brightness drops to less than 10 percent of full, then we may have a cave we have entered.
To verify , the robot drives forward until its bumper hits a wall. Then IF its still dark then the cave is verified.
HIDE STATE - Once the worm or robot verifies that it is indeed in a dark alcove or buried. it halts. and hides. This extreme survival measure is both life saving in the case of the worm, and for the robot it now knows its out of the way and parked in a safe place. Rip the cover off either organism and expose it to the light and it will go back into wander mode and search for a new hiding place.
MOVIES
Two short low res MPG movies are now provided here. The first, The robot is turned on, wanders against the side of the arena bounces off and then finds the cave (an inverted box). Since the robot is talking turn up your volume to hear what it is saying. The second movie clip shows the same cave hiding behavior but the camera is riding ON THE ROBOT. Just for fun...
(Voice Transcript: "Now Booting Up", "I am the Vision Logic Robot". "Found Possible Cave", "I am in the Cave Now".....)
Practical application
I don't know about you, but stepping on a robot in the dark at night can be a crippling experience for both you and the robot. By parking the robot in a save place such as a charging hut or under the coffee table is certainly safer than the robot weathering the night out in the open. A robot that is charged by solar cells can also benefit from this type of program. By reversing the thresholds in the cave verify state, we can have the robot look for a bright spot in the sun in the daytime for charging.
Conclusions of one pixel eye experiments.
In this last series of experiments and demonstrations, we have proven that it is certainly feasible to show the visual AI behavior of a simple organism such as a protozoan, worm or single celled animal. From these humble beginnings, we hope to move on to more advanced vision experiments, starting next with two eyes photocell like non imaging configuration. Stay tuned!