|
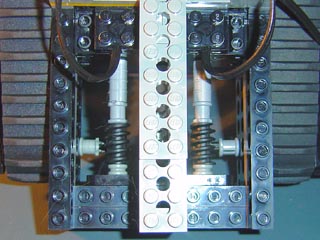
Here is a very slow dual worm drive
autonomous robot of minimal capability, as a single photocell
line follower. I've always wanted to try line follower robots,
and after making this highly geared drive system, I added the
line following capability. Another Lego Mindstorms type robot,
this one you can see the dual black worms on the motor shafts
in the upper right image. This made the robot move several seconds
per inch, and took 4 minutes to circumnavigate the round track
you see on the lower right! To improve the rather poor white
light sensor response, a cover plate was added as well around
the sensor which was only 1mm off the ground.
One sensor line followers
go on one edge of the line, they don't follow the inside of the
black line itself. The code is very simple - go left if you see
white, and go right if you see black. So it follows in a rather
ratcheting manner the edge of the line forever.
|