
 |
|
Building on the sophisticated navigation skills of PicBot II, this new robot will explore, document, and analyze the use of IR proximity sensors for indoor household navigation. We will examine every advantage, pitfall, and limitations of this concept, that will be followed by rigorous testing, and performance evaluations in the PicBot robot Arena.
PicBot III special features:
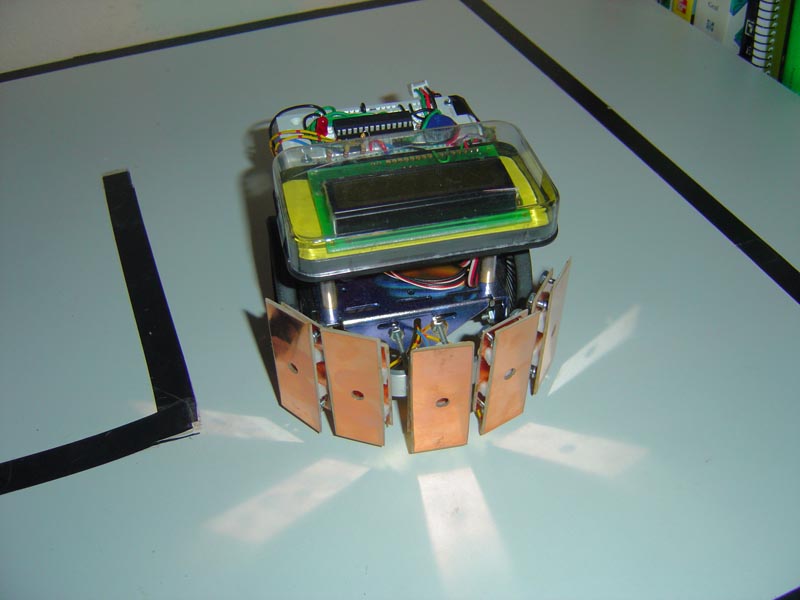
This PicBot is designed to simulate the round shape of a properly designed home interior robot using a seven inch metal ring secured to its exterior. The IR sensors are surface mount PCB's of my own design, and use the sharp IS471 modulated proximity device with one standard narrow beam IR LED for a light source. PicBot III uses two 12F629 processors for servo drivers, and a main 16F73 for the primary processor.
The Final Report/Article can now be seen here HOME