NavBot
3
Navigation
Robot Model 2
Updated
8/29/13
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI
NavBot
3
Navigation
Robot Model 2
Updated
8/29/13
Key
Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE,
AI

| This robot will charge by
sunlight, with a solar panel mounted at an angle on its rear.
Merely setting the robot in the sun when off will keep the battery
charged and ready. The goal of this robot is to autonomously
navigate from one end of the house to the other, without using
beacons or following lines. It will use local landmarks for navigation
and start and end within an inch of the disired goal locations.
This goal was accomplished in August of 2013 and after several
years of work on this robot, the final report can be issued! |
CLICK ON THUMBNAILS FOR A 1024 X 768 VIEW
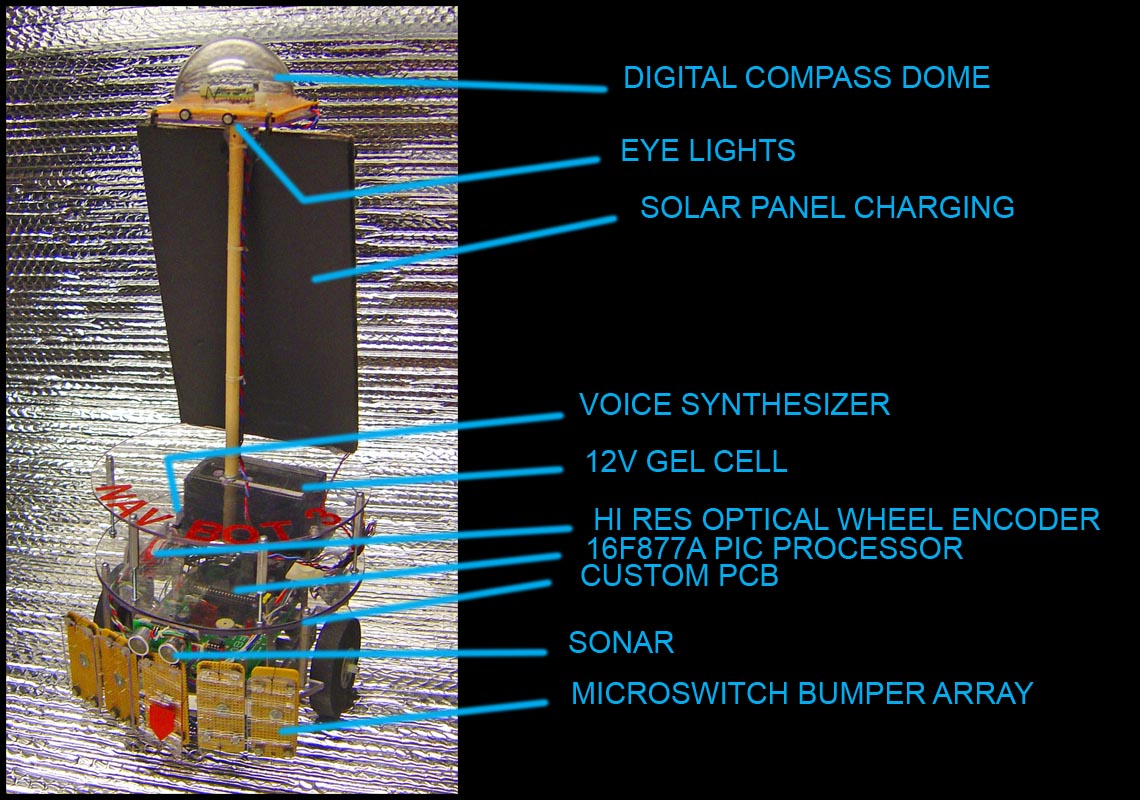
 | Detailed
view of the starting configuration of the NavBot 3. A Devantech
digital compass (now discontinued) is in the acrylic dome at
the top, mounted on a wooden mast about 12 inches up. The same
mast supports a large solar cell, which is leaned appropriately
to capture the sunlight from the east window after sunrise each
day. The eye lights allow one to see the robots orientation clearly
in dim lighting situations, and what robot would not have "Terminator"
style red eyes in the dark? The Devantech Voice synthesizer (also
now unfortunately just discontinued) allows verbal communication
of what the robot is currently processing. This is a major help
in the arena, when you cant see the LCD display on the back of
the robot most of the time. The wheel encoder is 1024 clicks
per revolution of one wheel and can be used for precise turns
or more often moving exact distances on smooth floors. Sonar
is fixed on the front, but will soon be changed to a movable
turret for scanning distances. Finally, the bumper array is a
set of tiny micro switches on the front of the robot for contact
information. |
| For
the first demonstrations, we will incorporate into the robots
subroutines various methods to not only orient itself accurately
in a closed arena, but to be able to navigate to a fixed home
position defined only by X,Y coordinates. The robot must be able
to find this position from any where in the arena, and park there
autonomously. This is the first step in the auto-homing process!
The method used for this first run will be to use the compass
to orient the robot along the edges of the arena, which happen
to lie North East at about 48 degrees. Then using the sonar,
it will identify the walls, determine its current X,Y coordinates
and plan a movement to the home position, which I am defining
as X=10 inches, Y= 11 inches from the arenas origin at the lower
left corner. Sounds easy right? Lets jump in and see the process
in action... |
|
Movie
1 | Left: This small movie clip shows the robots
first task, pointing at the East end of the robot arena. This
is the first step in navigation, to parallel the walls for X-Y
computations. The compass on the top of the robot is used here.
I am showing that no matter how the robot is oriented, it always
takes the SHORTEST ANGULAR DISTANCE to rotate to the home position. |
HOME