|
CBOT-1a: Plant
Watering Robot
In a 3 month long
project, the highly successful CBOT1 was finished growing a planter
full of seeds to huge pea plants, and after harvest time was
done, the next project was to rebuild this robot so that it would
be able to do more planters in its daily mission. The main frame,
water tanks and most of the mechanical mechanisms were retained,
however all the electronics was stripped out and the robot was
completely reprogrammed for its new sensors and sound synthesizer.
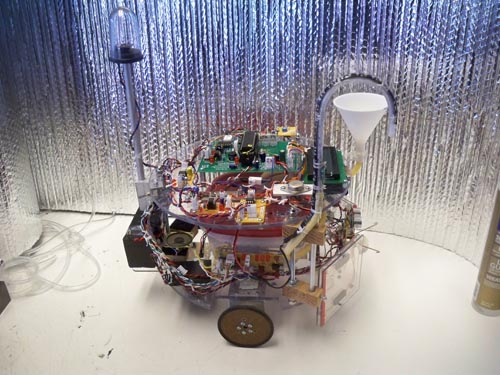
In the photo above, you can see without the robots water spash
dome in place the additional circuits that were added to the
top level. Here is a break down as to what we have right now,
just before we move the robot upstairs and program in the planter
locations for its new job:
|
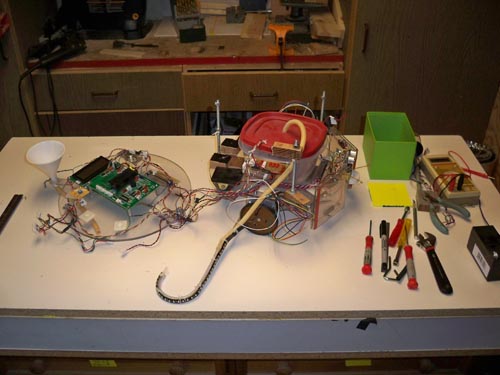
Poor
Robot! I first started by completely ripping the robot to pieces,
then removing all the non requred hardware... |

|
I
made brand new wheels from scratch. I cut round disks from Masonite
using a circle cutter on a drill press, then polyurethened them.
Next, the rim was made from rubber screen door molding wrapped
like a big grooved rubber band around the rim. Finally, an hub
set was made from some old gears. Two, three and four inch sizes
shown here. I use the 3 inch. |

|
Final
wheels, both sides! |

|
And
now installed on the robot to replace the awful plastic ones
had that had no traction. They work fantastic so far... |

|
All
new processor, a PIC16F887 that is more powerful and state of
the art. |

|
The
sound processor I designed to work with a serial input from the
main processor. Creating robot sounds takes A LOT of room up
on a robots program. This completely removes it to a small side
processor on a separate board. I simply send a single byte command
and up to 256 different sounds can be created. I ve only done
16 sounds so far... |
|
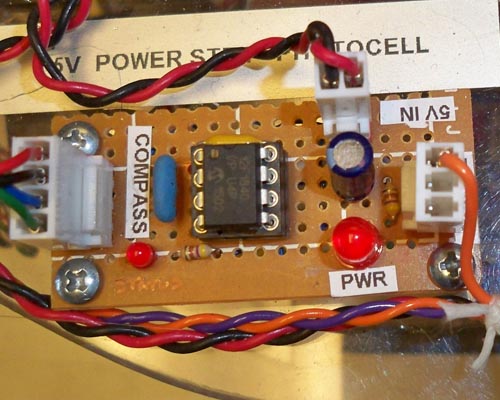
The
compass board and (not shown) the new sonar sensor board are
also taking a huge load of the main processor. In fact, I now
have half the program space left over and can now fill in the
driving directions to many planters now! The compass especially
puts a huge load on the main chip, and is done here with a brand
new state of the art 8 pin chip that I am using for the first
time here, the 12F1840. |
|
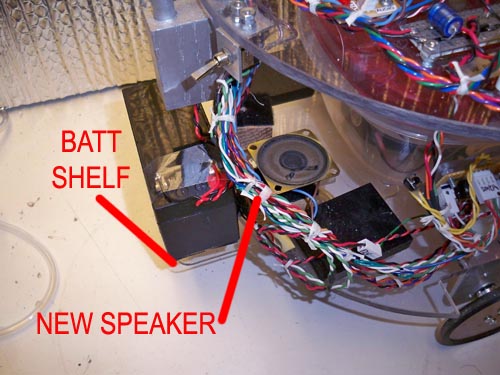
On the lower deck
there have been lots of changes too. Here a new sound system
allows you to actually hear the robots sounds now. (They were
very faint before because of a very tiny speaker)
Also a battery
shelf puts the center of gravity of the robot more towards the
back and keeps it from almost tipping over forward when it stops.
|
|
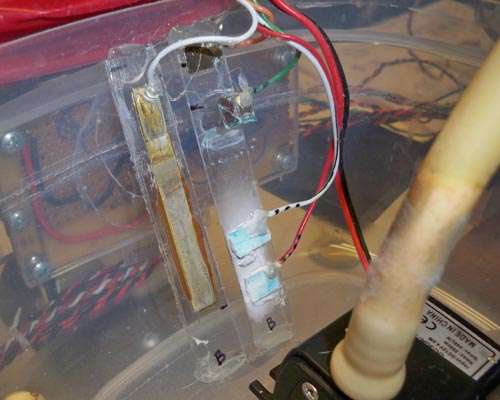
The
water tank sensors in the robots bottom section became totally
corroded in only 3 months. Seen here they are green with corroded
plates and wires. This was all torn out and replaced with.... |

|
Totally
stainless steel wires and screws above the water line. No more
corrosion and they sense the water levels just fine. |
|
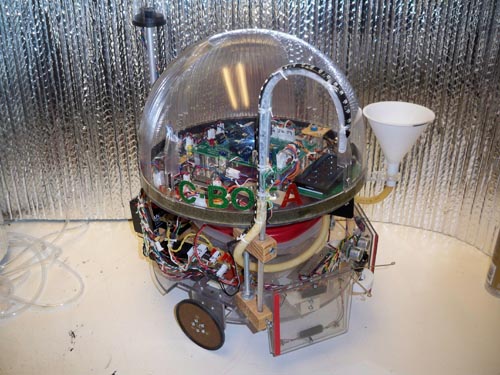
The splash dome
in place, the final appearance of the new CBOT-1A.
The next step is
we are moving the robot upstairs and progrmming it to water three
planters. Stay tuned!
|
|